触觉传感器可以赋予机器人通过接触来感知外部环境并与之交互的能力,在机器人灵巧操作、人机共融、模式识别等领域有着重要的应用。人类的皮肤不仅可以感知力的大小和方向,并且对外界刺激的定位精度可以超越触觉感受器间的平均间距,因此人的双手可以完成非常精巧和复杂的任务。与人类皮肤相比,现有的机器人触觉传感器还存在较大差距,例如为了实现力的解耦,往往需要设计复杂的传感器结构(如刚性梁)或拟合复杂的数学模型;在实现解耦的情况下,尚无法同时实现超分辨率检测;极大的限制了机器人在执行复杂任务上的能力。
来自香港城市大学生物医学工程系申亚京教授课题组与香港大学计算机系潘佳教授课题组合作,提出了一种基于磁性薄膜的触觉传感器,结合深度学习算法,实现了机器人触觉传感器的自解耦和超分辨率,为仿人类皮肤的触觉感知提供了新的思路。相关成果以“Soft magnetic skin for super-resolution tactile sensing with force self-decoupling(自解耦的超分辨率柔性磁性皮肤)”为题,于近日发表在《Science Robotics(科学:机器人)》上。
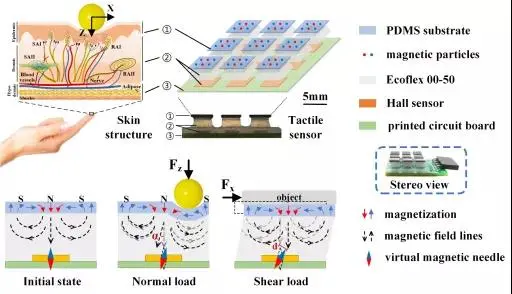
如图所示,该触觉传感器的核心由一层经单面多级正弦磁化的磁膜和嵌入在印刷电路板上的霍尔传感器组成。磁膜和霍尔传感器之间可以填充不同厚度和弹性的硅胶,用来调节传感器的灵敏度和量程。当有外力施加于磁膜上时,霍尔传感器将测量到由磁膜变形所引起的磁场变化,进而可以测量出所施加外力的大小和方向。该技术不仅在粒子加速器、磁悬浮列车、电磁炮等前沿领域有着重要的应用,在我们日常生活中使用的冰箱贴中也采用了类似技术。
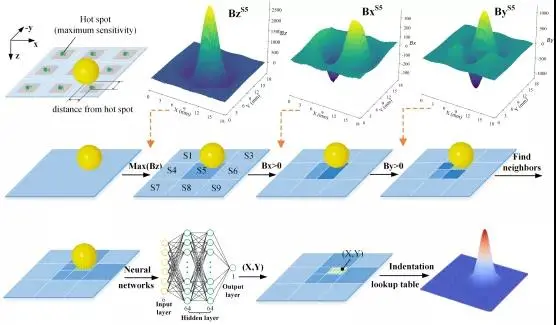
该磁性皮肤还具有触觉超分辨率,即对外界刺激的定位精度可以超越传感器的物理分辨率(两个传感单元之间的距离)。如图所示,一个小球压在磁性皮肤(具有3x3传感单元阵列)的传感单元S5上,通过定性分析霍尔传感器x,y,z方向上磁通量密度的变化,可以确定该小球与皮肤的接触位置在S5的右上角;进一步,通过神经网络的定量计算,小球的接触位置可以被精确定位到S5右上角的(X,Y)处,该定位精度(0.1mm)可以达到磁性皮肤物理分辨率(相邻传感单元的距离6mm)的60倍。
研究人员最后展望道:“具有自解耦功能的超分辨触觉感知在机器人领域有很大的应用潜力,可以赋予机器人灵巧操作日常物品的能力,提高人机交互的安全性,或许在不远的将来,覆盖有人工皮肤的家庭机器人将成为我们日常生活中不可缺少的一部分。在今后的工作中,我们希望能够开发出在更多维度上解耦的磁性皮肤,并针对不同的场景设计特定的超分辨率算法,实现硬件和软件的深度融合,从而使磁性皮肤的应用场景可以更加广泛”。
该项目研究得到了NSFC优青项目(港澳地区)61922093,NSFC- 深圳联合重点项目U1813211,香港UGC项目11211720 、11207818和11202119,NSFC/RGC联合研究项目N_HKU103/16以及深圳市学科布局项目JCYJ20200109114827177的共同资助。
文章链接:Y. Yan, Z. Hu, Z. Yang, W. Yuan, C. Song, J. Pan*, Y. Shen*, Soft magnetic skin for super-resolution tactile sensing with force self-decoupling. Sci. Robot. 6, eabc8801 (2021). DOI: 10.1126/scirobotics.abc8801